Forschungsbereiche
- LiDAR
- Radar
- Kamera
- Sensordatenfusion
- Erweiterte Fahrerassistenzsysteme (ADAS)
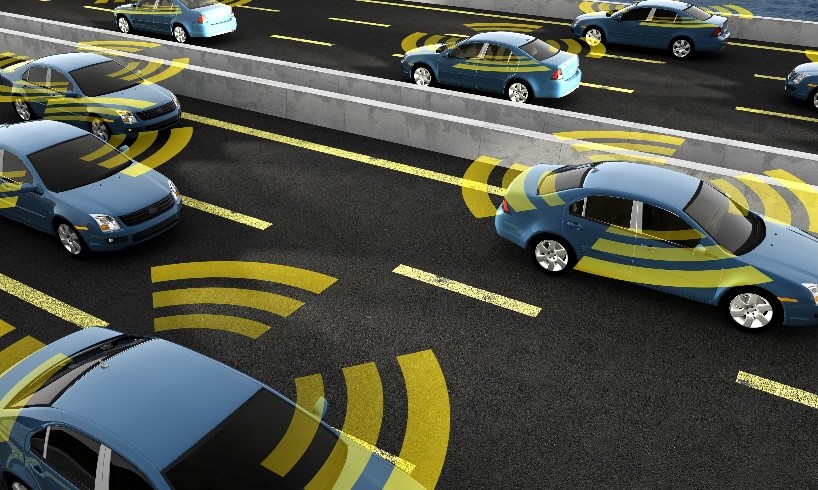
Smarte Lösungen für Systeme zur Fahrzeugumfelderkennung und Abstandsmessung ebnen den Weg für sicheren Verkehr und bilden die Grundlage für autonomes Fahren. Ein autonom fahrendes Auto kann sich nur dann sicher im Straßenverkehr bewegen, wenn es seine aktuelle Umgebung multisensoriell im 360°-Nah- und Fernbereich richtig und genau erfasst. Dies wird ausschließlich mit den Informationen der fahrzeugseitigen Sensoren erreicht.
LiDAR (Light Detection and Ranging) ist hierfür eine Schlüsseltechnologie. LiDAR-Systeme messen die Zeit, die das von einem Laser ausgesendete Licht benötigt, um von einem Objekt reflektiert und mit Hilfe eines Sensors detektiert zu werden. LiDAR-Sensoren liefern essentielle Informationen zur Objekterkennung und Kollisionsvermeidung, indem sie durch hunderttausende Abstandmessungen pro Sekunde ein exaktes 3D-Bild der Fahrzeugumgebung erzeugen. Im Zusammenspiel mit Kameras und Radarsensoren nehmen sie so ihr Umfeld wahr, helfen bei der Orientierung, erkennen Hindernisse, messen Abstände und sorgen so für mehr Sicherheit und Effizienz in komplexen Umgebungen und auf belebten Straßen.
Glatteis und Aquaplaning verwandeln Straßen in gefährliche Rutschbahnen und führen so häufig zu schweren Unfällen. In einer gemeinsamen Initiative mit Uedelhoven Studios arbeitet die Fraunhofer EMFT im Rahmen des Leistungszentrums »Sichere intelligente Systeme« (LZSiS) an einer Lösung des Problems.
Im Teilprojekt »Foliensensorik« entwickelte das Fraunhofer EMFT Team ein allgemeingültiges Verfahren, um (gedünnte) siliziumbasierte Sensorik auf flexible bzw. starr-flex Leiterplatten zu applizieren.
Ziel von radar4FAD ist die Erforschung eines für das vollautomatisierte Fahren geeigneten, leistungsfähigen, kosteneffizienten, ausfallsicheren und großserientauglichen Radar-Modulbaukastens.
Angesichts der sehr hohen Zuverlässigkeits- und Sicherheitsanforderungen, die für die Entwicklung elektronischer Systeme in Anwendungen Richtung autonomes Fahren von besonderer Bedeutung sind, kann ein erneutes Interesse an der Zuverlässigkeitsanalyse und -vorhersage für elektronische Verbindungen festgestellt werden.
Ziel des Leitprojekts ist die Entwicklung und Bereitstellung einer Technologieplattform, auf deren Basis Sensorsysteme, bestehend aus Sensorik und Elektronik, für den Einsatz in extrem rauer Umgebung entwickelt und hergestellt werden können.
Fraunhofer IZM bietet eine komplette Sensorentwicklung - vom Lastenheft, Konzept und Herstellung von Sensorelementen bis hin zum Packaging und Test.
Die Kombination von aktiven und passiven TSV-Silizium-Interposer-Wafern mit Kappen unter Verwendung von Wafer-zu-Wafer-Bonding-Technologien bietet neue Möglichkeiten für das hermetische Wafer-Level-Packaging von MEMS-Komponenten.
Diese Fraunhofer IZM Arbeitsgruppe konzentriert sich auf den optimierten Entwurf und die Charakterisierung von HF/Millimeterwellen-Radarmodulen unter Verwendung des M3-Ansatzes (Methoden, Modelle, Maßnahmen).
Im Rahmen des Bundesexzellenzclusters EXC 1075 »MERGE Technologies for Multifunctional Lightweight Structures« die Anwendung und Integration von Metamaterialien in Verbundmaterialien untersucht, um mit deren Hilfe Materialien mit sensorischen Eigenschaften hervorzubringen, die es erlauben, Zustandsinformationen berührungslos und bei Bedarf mit passiver Sensorik zu ermitteln
Am Fraunhofer FHR wurde ein Simulationstool entwickelt, das Radarrohdaten erzeugt und zeitdynamische Prozesse elektromagnetisch simuliert – basierend auf Physikalischer Optik und je nach Komplexität in Echtzeit.
Das Konsortium bestehend aus dem Fraunhofer FHR, IAIS, IVI und IIS erforschte in dem Projekt KonSens – »Kooperierende Sensorsysteme« die Machbarkeit und den Nutzen von vernetzten Sensorsystemen zur automatisierten Auswertung von Kreuzungen.
Eine intelligente Infrastruktur – vernetzt mit dem fließenden Verkehr – ist notwendig um in Zukunft automatisiertes und autonomes Fahren ohne Sicherheitsbedenken und effizient zu gestalten.
Das Fraunhofer FHR hat sich in der jüngsten Vergangenheit in mehreren Projekten intensiv mit dieser Thematik auseinandergesetzt und gemeinsam mit Zulieferfirmen, OEMs und Messgeräteherstellern Methoden zur geeigneten Materialcharakterisierung entwickelt.
Das Fraunhofer FHR hat gemeinsam mit der RWTH Aachen ein GPR-System – kurz für »Ground penetrating radar« oder bodendurchdringendes Radar – entwickelt, mit dem sich die Gleisbetten zerstörungsfrei und auf ganzer Länge untersuchen lassen.
In Fahrzeugen sind bereits zahlreiche Sensoren verbaut, die die Umgebung scannen und wertvolle Daten für die Fahrassistenz liefern. Für Fahrzeughersteller ist daher wichtig zu wissen: Wie verändern die Bauteile des Fahrzeugs die elektromagnetischen Signale, die die Sensoren aussenden und empfangen? Das Fraunhofer FHR führt solche Analysen präzise aus – und berechnet erstmals zu den Ergebnissen auch Angaben zur Messungenauigkeit.
In Fahrzeugen sind bereits zahlreiche Sensoren verbaut, die die Umgebung scannen und wertvolle Daten für die Fahrassistenz liefern. Für Fahrzeughersteller ist daher wichtig zu wissen: Wie verändern die Bauteile des Fahrzeugs die elektromagnetischen Signale, die die Sensoren aussenden und empfangen?
Ein neuartiges Radarsystem kann Ertrinkende zuverlässig orten und so künftig bei ihrer Rettung helfen. Ein erster Praxistest war äußerst vielversprechend, doch bis zum routinemäßigen Einsatz ist noch viel Forschungsarbeit nötig.
Eine radarbasierte Lösung aus dem Fraunhofer FHR könnte autonom fahrenden Autos künftig mehr Voraussicht verleihen: 10 bis 30 Zentimeter große Objekte erkennt sie bereits in 80 bis 150 Metern Entfernung.
Ein neues frequenzmoduliertes LIDAR-System vereint eine lange Reichweite mit einer guten Auflösung und ist zudem kostengünstig, klein und energieeffizient.
Gefördert durch das Bundesministerium für Wirtschaft (BMWI).
Das Fraunhofer HHI nutzt die Infrastruktur des BST, um Sensorsysteme für eine zuverlässige Charakterisierung und frühzeitige Identifikation von sicherheitskritischen Zuständen zu entwickeln.
Für die Entwicklung von Sensorik, Charakterisierungs- und Sicherheitssystemen steht ein umfassendes Testportfolio zur Verfügung, mit welchem interne sowie von Kooperationspartnern begleitete Forschungsaktivitäten zielorientiert realisiert werden können.
Das Leistungszentrum »Digitale Vernetzung« bündelt die Expertise von vier Berliner Fraunhofer-Instituten (Fraunhofer FOKUS, Fraunhofer HHI, Fraunhofer IPK & Fraunhofer IZM) und unterstützt die deutsche Wirtschaft und die Unternehmen der Region Berlin-Brandenburg, die Potentiale der Digitalisierung umzusetzen.
Kombiniert mit fortschrittlichen Multiple-Wafer-Glasfrit-Bonding-Technik für hermetische Versiegelung wird eine hohe mechanische Robustheit und ein Schutz gegen Partikel und Feuchtigkeit erreicht
In den vier Kategorien leistungsstarke Sensorik, Sensordatenfusion, Systemintegration und Validierung entwickelt das Fraunhofer IMS anwendungsspezifische Lösungen.
Unter dem Motto »Research Together« entsteht das Projekt »Next Level Photonics«, zwischen dem Fraunhofer IMS, dem Fraunhofer ISIT und der hochdotierten Kyoto Universität aus Japan.
Mit LiDAR (Light Detection and Ranging) wird die Entfernung durch die Messung der Zeit zwischen der Aussendung und dem Empfang eines Laser Impulses bestimmt.
Die neue kompakte LiDAR (light detection and ranging) Kamera Owl steht für schnelle und zuverlässige Entfernungsmessungen.
Innerhalb des Leitprojekts ALBACOPTER® soll unter Leitung des Fraunhofer IVI eine fliegende Experimentalplattform mit der VTOL-Fähigkeit eines Multicopters und den aerodynamischen Vorzügen eines Gleiters entwickelt und für Test- und Demonstrationsflüge zugelassen werden.
Schnellere und datenreduzierte Lösung für hochauflösende LiDAR-Systeme: TimestampsAI ist die neueste Entwicklung für Ihre Anwendungen zur Erfassung komplexer Szenen in 3D in jeder Umgebung.
Um maschinelles Sehen in drei Dimensionen zu ermöglichen, entwickelt ein Forschungsteam am Fraunhofer IPMS ein »scannendes Auge«.
Das Fraunhofer ISIT hat im Bereich der optischen MEMS eine 3D-Kamera mit einer Tiefenauflösung von wenigen Millimetern auf Basis von 2D-MEMS-Scannern entwickelt.
Unter dem Dach der Forschungsfabrik Mikroelektronik Deutschland (FMD) entwickelten die Fraunhofer-Wissenschaftler:innen mit ihren Partnern ein hochauflösendes Weitwinkel-Lidar-System.
Die technologische Weiterentwicklung von hochauflösenden Radarsensoren, hochgenauen Messsystemen und drahtlosen Datenlinks mit enormen Übertragungsgeschwindigkeiten ist geprägt durch die Erschließung von immer höheren Frequenzbereichen.