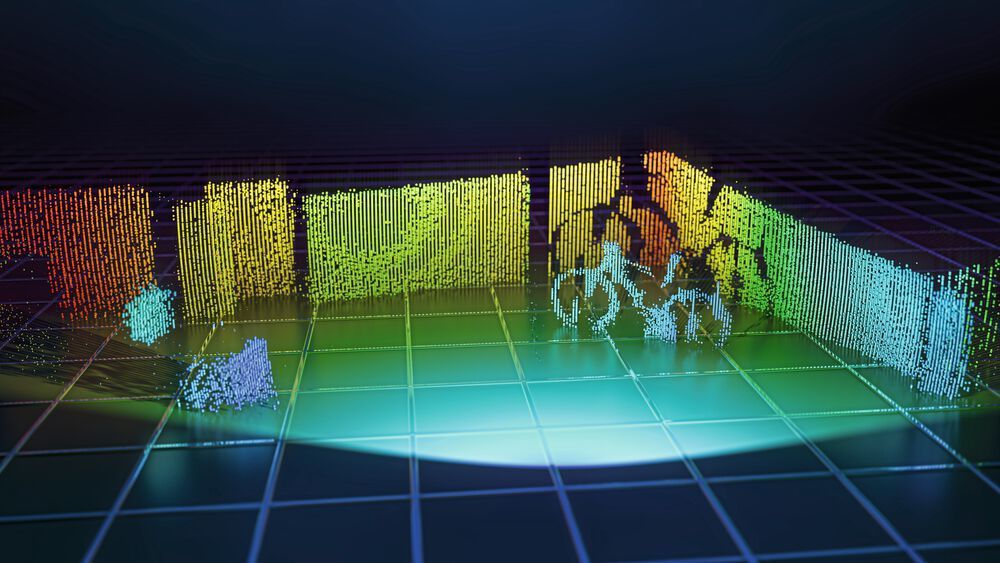
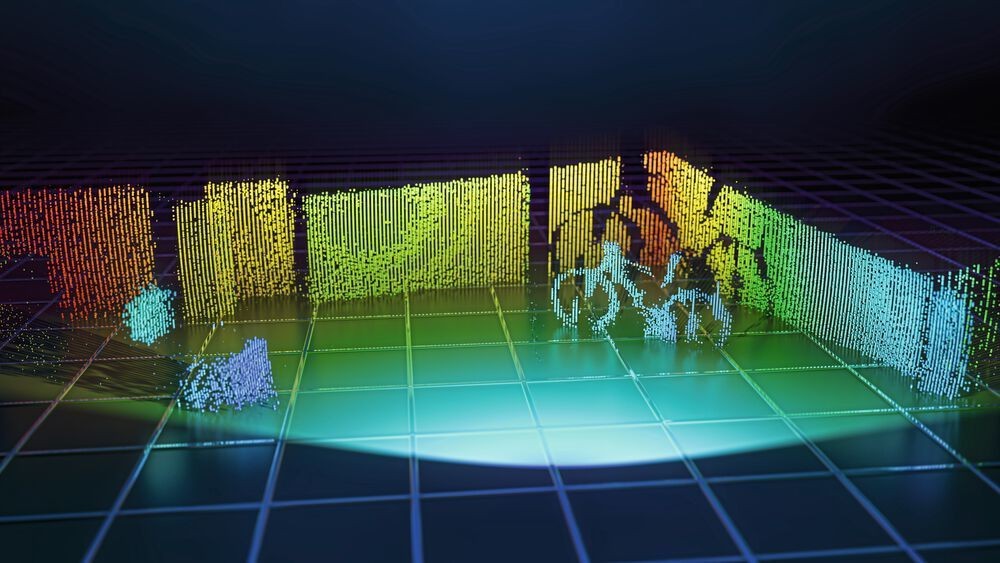
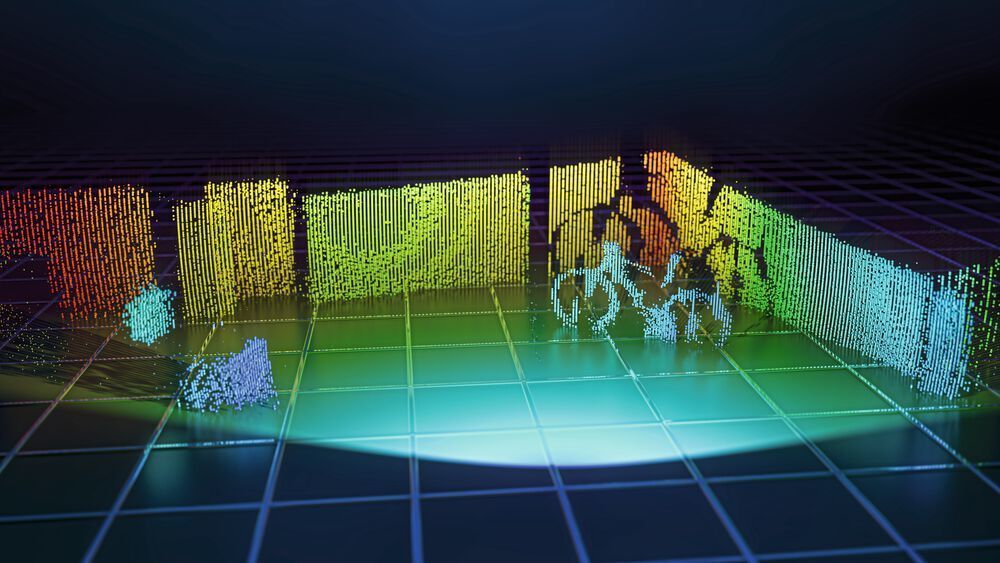
Ein Lidar mit hoher Auflösung für das nahe Umfeld bis 25 m soll die Sicherheit von autonomen oder teilautonomen Fahrzeugen erhöhen. Entstanden ist ein weniger komplexes System.

Mit Lidar-Systemen wollen die Automobilhersteller das teilautonome und das autonome Fahren vorantreiben. Grundlage ist die 3D-Objekterkennung mithilfe der Lidar-Technik.
Für die Pilot- und Testphase sind derzeit eine Vielzahl solcher Sensoren notwendig, wie beispielsweise Robotertaxen, die allerdings für den Massenmarkt weder preis- noch massentauglich sind. Unter dem Dach der Forschungsfabrik Mikroelektronik Deutschland (FMD) startete im Juli 2019 ein Proof-of-Concept-Projekt für ein hochauflösendes Weitwinkel-Lidar-System. Das MEMS-Start-up OQmented hatte die Projektierung inne und verantwortete die Systemintegration der aus den Instituten beigesteuerten Komponenten.
Das Ferdinand-Braun-Institut stellte eine Pulslaserquelle inklusive einer Steuerelektronik bereit, das Fraunhofer-Institut für Mikroelektronische Schaltungen und Systeme IMS brachte ein SPAD-Array mit einer Vorverarbeitungs-Elektronik ein und das Fraunhofer-Institut für Siliziumtechnologie ISIT produzierte die MEMS-Scanner, welche exklusiv von OQmented kommerzialisiert und weiterentwickelt werden. Das Projekt wurde im Rahmen des FMD-Space zur Unterstützung von Hochtechnologie-Start-ups umgesetzt, welches von Stephan Guttowski und Christoph Galle koordiniert wird.
Fokus auf Nahbereichs-Lidar
Im Rahmen des Projekts sollte die Leistungsfähigkeit des weltweit ersten 180°-MEMS-Scanners nachgewiesen werden. Start-up-Unternehmen und Tier1 haben sich in den letzten Jahren darauf konzentriert, große Entfernungen zu detektieren. Die Reichweiten überschritten dabei 250 m und mehr. Dabei wurde der allerdings wichtige kurze bis mittlere Entfernungsbereich eines Fahrzeugs vernachlässigt.
Nach Ansicht von OQmented bietet der Bereich kurzer und mittlerer Entfernungen einen besonders großen Mehrwert für die Verkehrssicherheit. Hier kommen derzeit Kamera- und Radar-Systeme zum Einsatz, welche allerdings verschiedene Nachteile mit sich bringen. Dazu gehört beispielsweise eine zu geringe Auflösung und mangelnde Nachtsichtfähigkeit. So sind etwa Wildwechsel, Rechtsabbiegesituationen mit totem Winkel zu anderen Verkehrsteilnehmern und komplexe Kreuzungssituationen in Innenstädten nur einige Fälle, bei denen Entfernungen von 25 bis 50 m in einer hochauflösenden Darstellung von besonderem Interesse ist.
Ein minimal komplexes Gesamtsystem
Im Kern besteht ein Lidar-System aus einem Laser, einem Scanner und einer Fangoptik, welche jeweils über Elektronikkomponenten miteinander kommunizieren. Die meisten Lidar-Systeme bestehen aus einer Vielzahl von Lasern und optoelektronischen Komponenten, diese sind komplex in der Fertigung, aufwendig in der Feinausrichtung für ein reibungsloses Zusammenspiel und in der Menge kostenintensiv. Zudem muss ein solches System zur Anwendung in der Serienfertigung eines Fahrzeugs entsprechend qualifiziert werden.
Der Ansatz von OQmented verfolgt eine radikale Reduktion der Gesamtkosten und Systemkomplexität. Der gewählte Ansatz beschränkt sich auf jeweils eine Komponente, welche als Standardkomponenten eingebracht wurden. Somit ist keine Vorentwicklung zur Abstimmung des Zusammenspiels notwendig.
Erstmalig wurden folgende Komponenten miteinander kombiniert:
- Wellenlängenstabilisierter Laser mit 905 nm und weniger als 30 W optischer Spitzenleistung,
- 1D resonanter MEMS-Scanner mit einem Field of View von 180° sowie einer hermetischen Vakuumverkapselung und
- 192 x 2 CMOS-SPAD-Detektor mit einer TDC-Auflösung von 312,5 ps.
Das Projekt mit Konzept-, über Entwicklungs und Setupphase bis zur finalen Demonstration dauerte zwölf Monate. Dabei konnten die Teammitglieder über einfach zu realisierende Anpassungen das Lidar-System entsprechend ausbauen und verbessern.
Mit einem Wert von 140° des horizontalen Field of View (FoV) lässt es sich über eine verbesserte Abbildungsoptik erhöhen. Vertikal lag das FoV bei 15° und es lässt sich durch eine optimierte Laserquelle ebenfalls verbessern. Entsprechend der genannten Komponenten kann die horizontale Auflösung von 0,5°, vertikal 0,25°, deutlich erhöht werden und ein Zielvorgabe von 0,1° erreichen. Die Reichweite liegt bei 25 m, welche durch ein verbessertes Signal-Rausch-Verhältnisses erhöht werden kann.
Lidar-System weiter miniaturisieren
Die Ergebnisse des Proof-of-Concept bieten eine solide Grundlage, um für den industriellen Einsatz übertragen zu werden. Außerdem lässt sich das Lidar-System weiterentwickeln. Die Ansatzpunkte für eine Go-to-Market-Strategie und somit eines erfolgreichen Projektergebnisses sind, das Gesamtsystem weiter zu miniaturisieren und die Framerate zu erhöhen.
Ziel ist es, die verwandten Standardkomponenten auf eine systemintegrations- und leistungsanforderungsrelevante Größe zu reduzieren. Durch eine verbesserte Komponentenabstimmung, vor allem auf der Elektronikebene, kann eine Framerate erzielt werden, welche die Automobilanforderungen erfüllt. Der finale Schritt zur Markteinführung ist die Qualifizierung für die Systemintegration in ein Automobil oder Lastkraftwagen, um beispielsweise den toten Winkel beim Rechtsabbiegen sicher zu erfassen.
Das dieser Veröffentlichung zugrunde liegende Vorhaben wurde zum Teil mit Mitteln des Bundesministeriums für Bildung und Forschung unter den Förderkennzeichen 16FMD01K, 16FMD02 und 16FMD03 gefördert.
{kind=link}